|
|
|
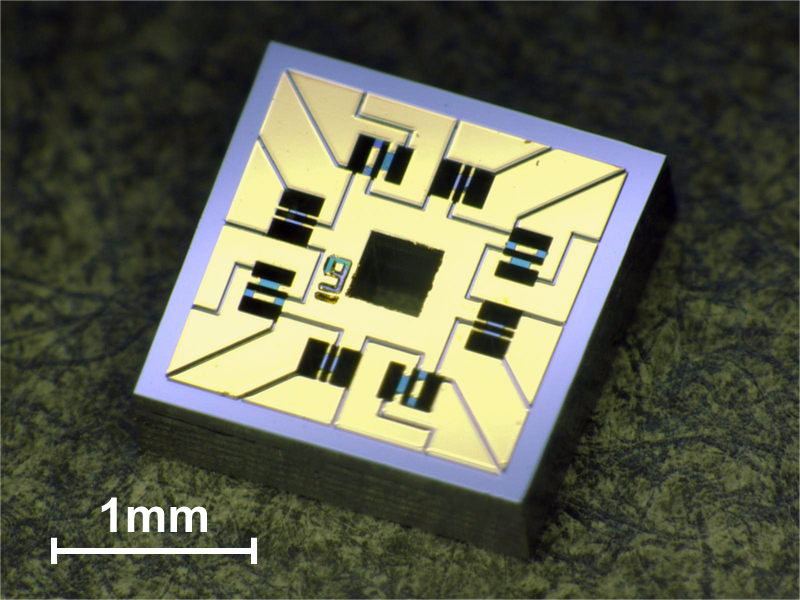
ロボティクスやヒューマンインタフェース、ヘルスケア等の分野において、低価格な6軸力覚センサへのニーズが高まっている。しかしながら歪ゲージやキャパシタを使用した市販の6軸力覚センサは、最小のもの(ATI Industrial Automation製Nano17)で直径17mm、厚さ14mm、最薄のもの(テック技販製USL06-H5)で一辺20mm、厚さ5mmであるため、特に厚さが問題となり前述の用途には適さなかった。本研究では、16本のピエゾ抵抗型ビームから構成され、樹脂内に埋め込んで使用する6軸力覚センサチップの設計・試作・検証を行なった。シリコーンゴムやエポキシ樹脂など、センサチップを埋め込む樹脂の硬さやサイズを選択することで、用途に応じた適切なセンサ設計が可能となる。センサチップのサイズは2mm角と小さく、アレイ化の際には実装密度を高めることが、また量産時にはコスト低減が可能である。センサチップの試作は国内の8インチMEMSファウンドリであるMNOIC(MicroNano Open Innovation Center)で行なった。ウェハ内の抵抗値のばらつきを評価し、実用上問題の無いレベルでばらつきが小さいことを確認した。また、エポキシ樹脂で埋め込んだセンサの較正および特性評価を行ない、3軸力並びに3モーメントが検出できることを確認した。
References :
1.Akihito Nakai, Yasuhiko Morishima, Kiyoshi Matsumoto and Isao Shimoyama, “6-axis force –torque sensor chip composed of 16 piezoresistive beams,”; The 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS 2015), Estoril, Portugal, pp. 730-733, January 18-22, 2015. [Procedding]
|