Japanese |
English |
2013-2017 文科省科学研究費 特別推進研究MEMS 多軸力センサを用いた生物の運動計測 |
| 研究目的 |
本研究グループでは、生物が移動する際に生じる力を定量的に計測するため、任意の点に働く力・トルクを計測するためのプローブ型多軸力センサと、力の分布・推移を計測するための平面型多軸力センサの2タイプのセンサを実現することを目的とする。 |
| 研究課題 |
| 1.プローブ型多軸力センサ |
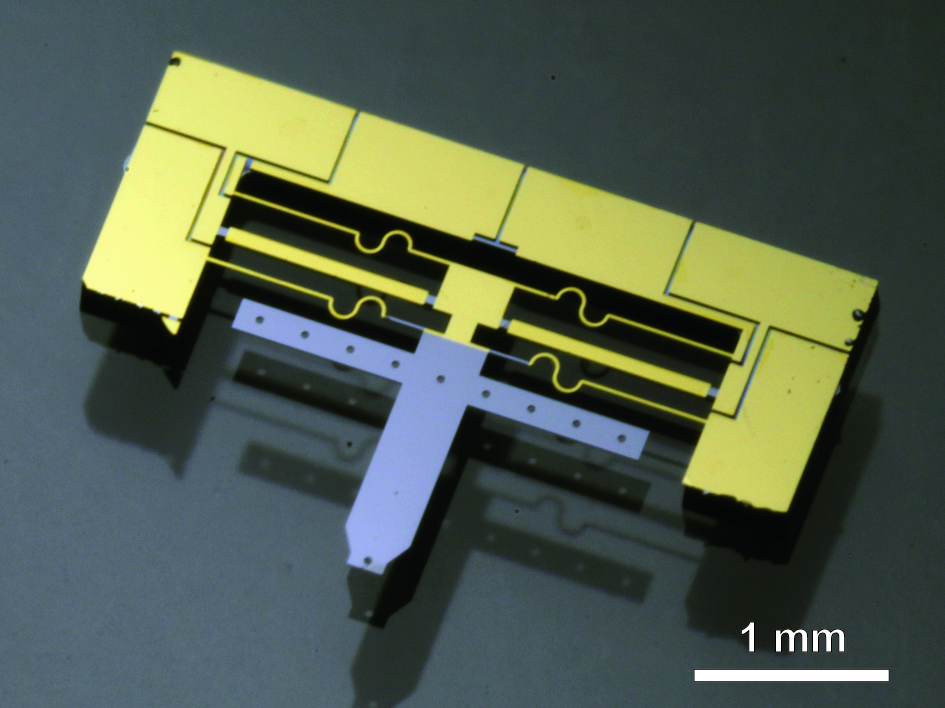
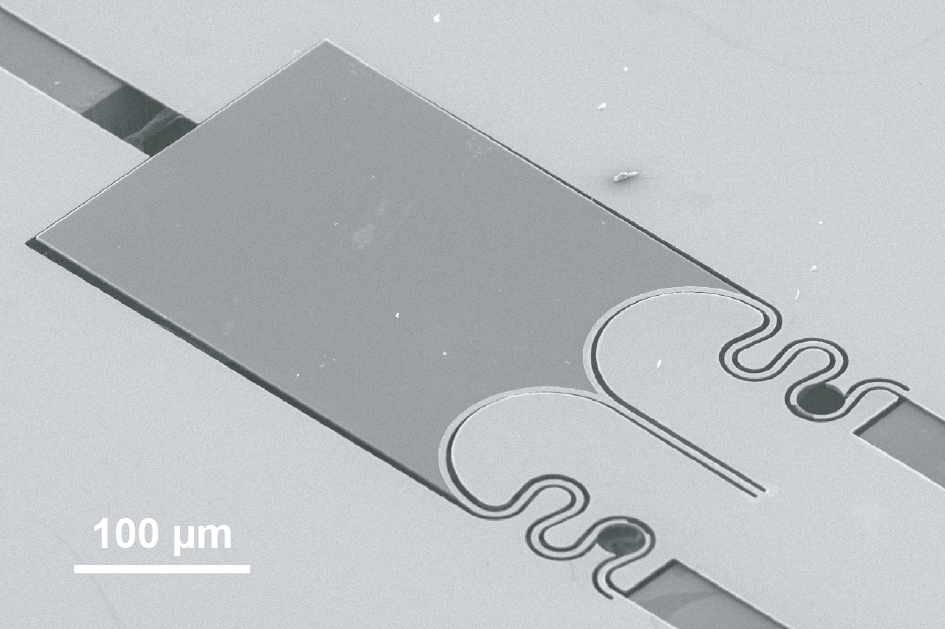
1-1.三軸力+モーメントを計測するためのプローブ型多軸力センサ
|
1-2.せん断方向空気力計測センサ
|
| 2.平面型多軸力センサ |
2-1.ピエゾ抵抗素子の表面・側面形成方法を用いた平面型三軸力センサ
|
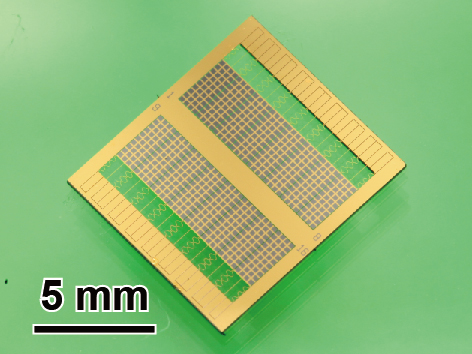
2-2.平面型多軸フォースプレート
|
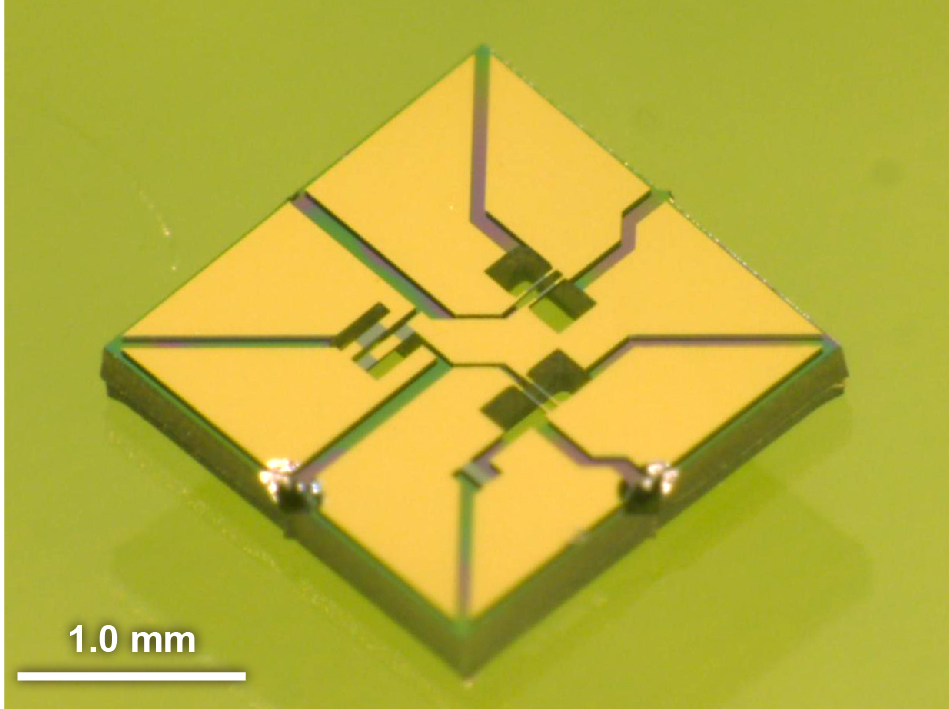
2-3.平面型六軸力センサ
|
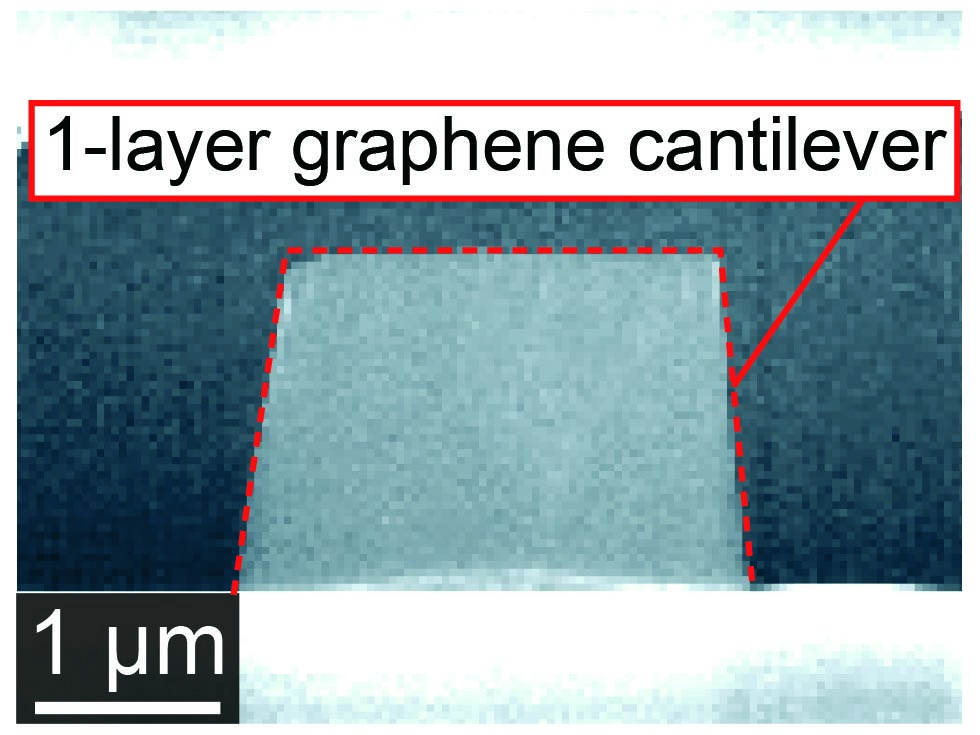
2-4.グラフェン片持ち梁構造
|
東京大学大学院 情報理工学系研究科 知能機械情報学専攻 下山研究室
|
Shimoyama Lab., Department of Mechano-Informatics, Graduate School of Information Science and Technology, The University of Tokyo.
|