|
|
|
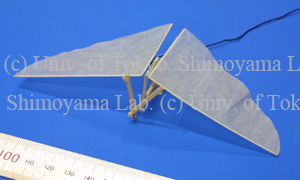
We developed a small and ultralight butterflytype ornithopter (BTO) for the investigation of butterfly flight. It weights 0.4 g, with 140 mm wingspan and 10 Hz flapping
frequency. It flies forward without a stabilizing fin. The flights of the BTO were recorded by a high-speed video camera, and we investigated the longitudinal motion of the flight. When the gravity point was appropriate, the angle of attack of the body varied cyclicly. We found that the cyclic change of the angle of attack played important role for producing total upward aerodynamic force. Then we visualized air flow around the BTO both in tethered flight and in free flight. We revealed that free body movement caused stable attachment of leading edge vortex and smooth upstroke. It could not be observed in tethered flight.
References :
Hiroto Tanaka, Kazunori Hoshino, Kiyoshi Matsumoto, Isao Shimoyama, “Study on Flapping Flight of a Butterfly,” The 22nd Annual Conference of The Robotics Society of Japan, Gifu, Japan, Sep. 15-17, 2004. [PDF]
Hiroto Tanaka, Kazunori Hoshino, Kiyoshi Matsumoto, Isao Shimoyama, “Flight Dynamics of a Butterfly-type Ornithopter,” 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS '05), pp. 310-315, Edmonton, Alberta, Canada, August 2-6, 2005. [Proceedings]
Hiroto Tanaka, Kazunori Hoshino, Kiyoshi Matsumoto, Isao Shimoyama, “Passive Change of an Angle of Attack in Butterfly-type Flapping Flight,” Transactions of the Japan Society of Mechanical Engineers B, vol. 72, no. 718, pp. 1490-1496, 2006. |
Movie