|
|
|
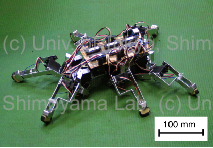
Each leg moves autonomously, and coordinates with each other by using
the inhibitation signal based on insects' neural network model.
References :
Eiji Iwase, Shinichiro Kato, Takashi Yasuda, Isao Shimoyama, “A Turning Gait Generating Network for a Hexapod Robot,”Journal of the Robotics Society of Japan, Vol. 22, No. 4, pp. 70-76, May, 2004. [Paper]
movie
|